
Artificial muscles, molecular actuator design, microscopic theory of nanotube and conjugated polymer actuation
In the past few years, the design of molecular machines has been an intriguing domain for chemists. One goal has been to mimic some of the actions of biological motors. One of the most interesting subjects is to develop actuators or artificial muscles, which can contract in a controllable fashion. Basically, the actuation mechanism is based on the fact that the actuator materials or assemblies are able to transduce optical, electrical or chemical stimulus into mechanical work through dimensional response. The advantages and limitations of the exploited artificial muscles have been generalized by Baughman and the strategies to improve the performance were suggested.
One of the electro-active materials which attract most interests is composed of conducting polymers such as polypyrrole, polyaniline, and polythiophene and carbon nanotubes. One of the main operating principles of this class of redox-active materials is based on the intercalation of dopants and counterions in the polymer matrixes during the redox process, which induces volume change. The major disadvantage of this bulk mechanism is that the actuation frequency is diffusion limited by the counterion flux. In order to overcome this shortcoming, efforts have been addressed to the design of molecular actuators, the actuating mechanism of which roots in the intrinsic properties of the actuator materials. The intrinsic actuation mechanism of polyacetylene and carbon nanotubes has been studied by our group is a quantum mechanical calculations based on the principle that the frontier orbitals that are active during the redox process cause the elongation/shortening of the chain of the material. Current work extends these previous results and additionally explores new opportunities offered by conformationally flexible groups that can open and close upon redox processes involving multicenter radical bonding in nanomaterials.
Selected references:
- “Carbon Nanotube Actuators”
- Baughman, R.H; Cui, C.X.; Zakhidov, A.A.; Iqbal, Z.; Barisci, J.N.; Spinks, G.M.; Wallace, G.G.; Mazzoldi, A.; De Rossi, D.; Rinzler, A.G.; Jaschinski, O.; Roth, S. ;Kertesz, M. Science 1999, 284, 1340-1344.
- “Dimensional Changes as a Function of Charge Injection in Single Walled Carbon Nanotubes”
- Sun, G.Y.; Kürti, J.; Kertesz, M.; R. H. Baughman, J. Am. Chem. Soc. 2002, 124, 15076-15080.
- “Single-Walled Carbon Nanotubes: Geometries, Electronic Properties, and Actuation”
Sun, G.; Nicklaus, M.; Kertesz, M.; Dekker Encyclopedia of Nanoscience and Nanotechnology, 2004; 3605-3615 - Molecular Actuators Designed with S\N(sp 2) bonds and Conformationally Flexible Biphenyl Scaffold”
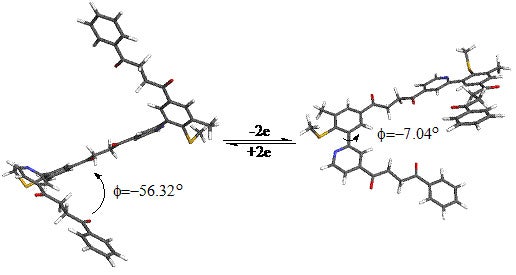
- “Molecular Actuators Designed with S…N(sp(2)) Hemibonds Attached to a Conformationally Flexible Pivot“
Tian, Y.-H.; Kertesz, M. Chem. Mater. 2009, 21, 2149-2157.